Overview
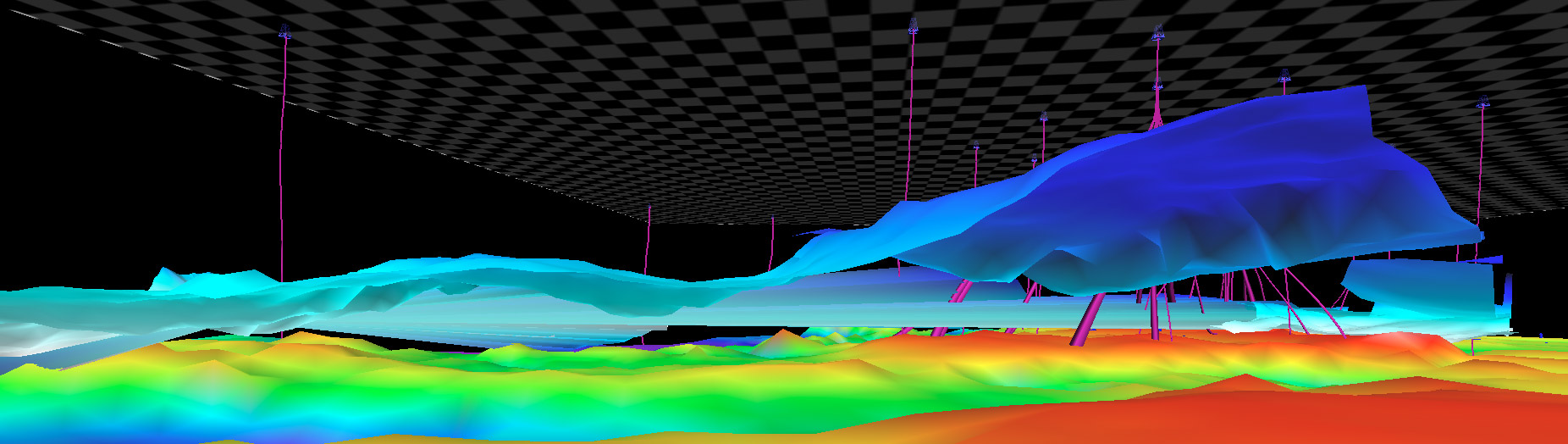
The core goal of IDP was to improve the safety and efficiency of directional well planning. An immersive visualization environment was used to enable better understanding of the data, and to facilitate group collaboration more effectively than was possible at the time using VR goggles.
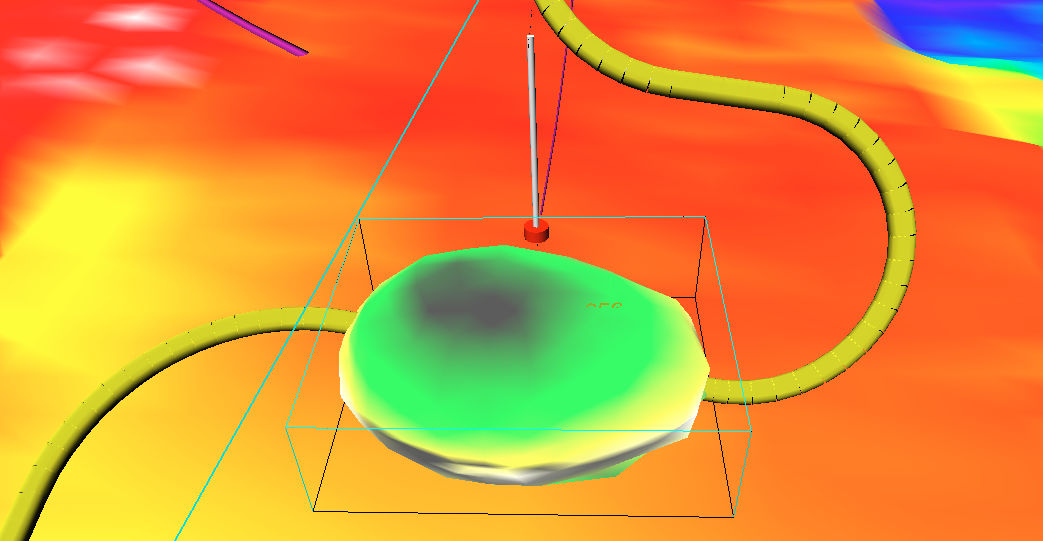
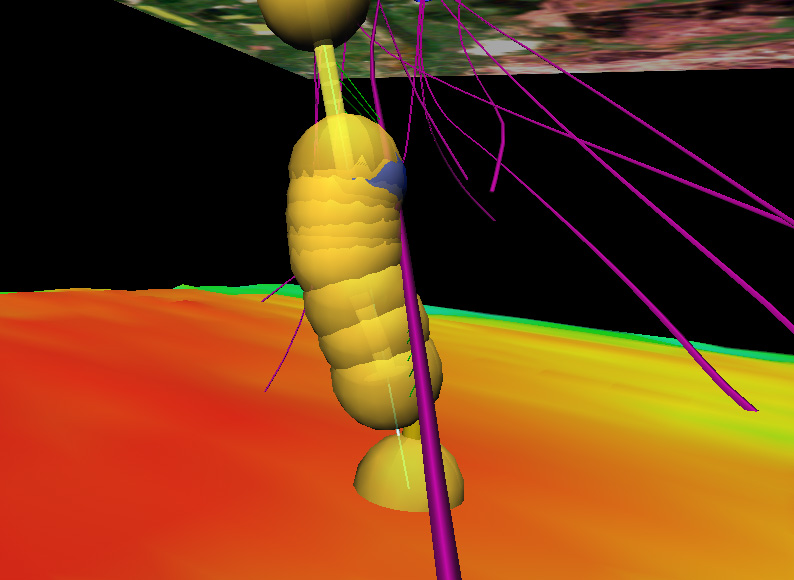
IDP also used algorithmic constraints on the planned wells, which allowed the user to manipulate the well-path easily using interactive widgets, while at the same time, ensuring that the end result could actually be drilled. My contributions were mostly focused on these tools, rather than the 3D visualization.
IDP also used algorithmic constraints on the planned wells, which allowed the user to manipulate the well-path easily using interactive widgets, while at the same time, ensuring that the end result could actually be drilled. My contributions were mostly focused on these tools, rather than the 3D visualization.